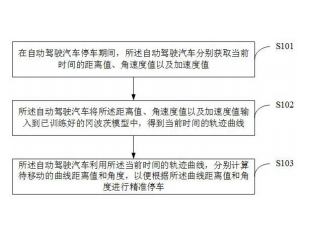
本发明公开了一种自动驾驶汽车精准停车控制方法及装置,其方法包括:在自动驾驶汽车停车期间,所述自动驾驶汽车分别获取当前时间的距离值、角速度值以及加速度值;所述自动驾驶汽车将所述距离值、角速度值以及加速度值输入到已训练好的冈波茨模型中,得到当前时间的轨迹曲线;所述自动驾驶汽车利用所述当前时间的轨迹曲线,分别计算待移动的曲线距离值和角度,以便根据所述曲线距离值和角度进行精准停车。
收藏
价格:面议
本发明公开了一种自动驾驶汽车精准停车控制方法及装置,其方法包括:在自动驾驶汽车停车期间,所述自动驾驶汽车分别获取当前时间的距离值、角速度值以及加速度值;所述自动驾驶汽车将所述距离值、角速度值以及加速度值输入到已训练好的冈波茨模型中,得到当前时间的轨迹曲线;所述自动驾驶汽车利用所述当前时间的轨迹曲线,分别计算待移动的曲线距离值和角度,以便根据所述曲线距离值和角度进行精准停车。
5.0
4.0
3.0
2.0
1.0
全部
好评(0)
中评(0)
差评(0)