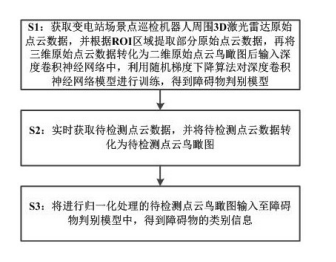

本发明提供一种变电站巡检机器人障碍物判别方法及系统,方法包括以下步骤:S1:获取变电站场景点巡检机器人周围3D激光雷达原始点云数据,并根据ROI区域提取部分原始点云数据,再将三维原始点云数据转化为二维原始点云鸟瞰图后输入深度卷积神经网络中,利用随机梯度下降算法对深度卷积神经网络模型进行训练,得到障碍物判别模型;S2:实时获取待检测点云数据,并将所述待检测点云数据转化为待检测点云鸟瞰图;S3:将进行归一化处理的所述待检测点云鸟瞰图输入至障碍物判别模型中,得到障碍物的类别信息。该方法不受光线条件限制,能实现巡检机器人夜间工作,使得变电站巡检机器人全天候巡检的目标成为可能。
易创经云咨询有限公司
XXX月前
该服务非常好,速度快,售后很好!该服务非常好,速度快,售后很好!该服务非常好,速度快,售后很好!该服务非常好,速度快,售后很好!该服务非常好,速度快,售后很好!该服务非常好,速度快,售后很好!该服务非常好,速度快,售后很好!该服务非常好,速度快,售后很好!
易创经云咨询有限公司易创经云咨询有限公司
XXX月前
该服务非常好,速度快,售后很好!