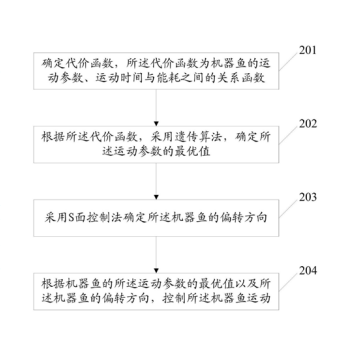

本发明公开了一种机器鱼运动的控制方法及系统。该方法包括:确定代价函数,所述代价函数为机器鱼的运动参数、运动时间与能耗之间的关系函数,所述运动参数包括机器鱼尾鳍的摆动偏转角、摆动幅值、摆动频率;根据所述代价函数,采用遗传算法,确定所述运动参数的最优值;采用S面控制法确定所述机器鱼的偏转方向;根据所述机器鱼的所述运动参数的最优值以及所述机器鱼的偏转方向,控制所述机器鱼运动。本发明提供的机器鱼运动的控制方法及系统将机器鱼运动所产生的运动能耗与机器鱼的控制相结合,能够在满足机器鱼既定任务的同时,降低机器鱼的运动能量的消耗。
易创经云咨询有限公司
XXX月前
该服务非常好,速度快,售后很好!该服务非常好,速度快,售后很好!该服务非常好,速度快,售后很好!该服务非常好,速度快,售后很好!该服务非常好,速度快,售后很好!该服务非常好,速度快,售后很好!该服务非常好,速度快,售后很好!该服务非常好,速度快,售后很好!
易创经云咨询有限公司易创经云咨询有限公司
XXX月前
该服务非常好,速度快,售后很好!